I'm a Robotics and Automation Engineer with a background in Mechanical Engineering and currently pursuing my Master's degree in Industry 4.0: Automation, Robotics & 3D Manufacturing at SRH Berlin University of Applied Sciences.
My journey combines a strong foundation in engineering with hands-on experience in production support and automation from Goldman Sachs, where I worked as a Technical Analyst in the Prime Services Risk Technology team. Now, I'm channeling my passion for robotics into real-world applications.
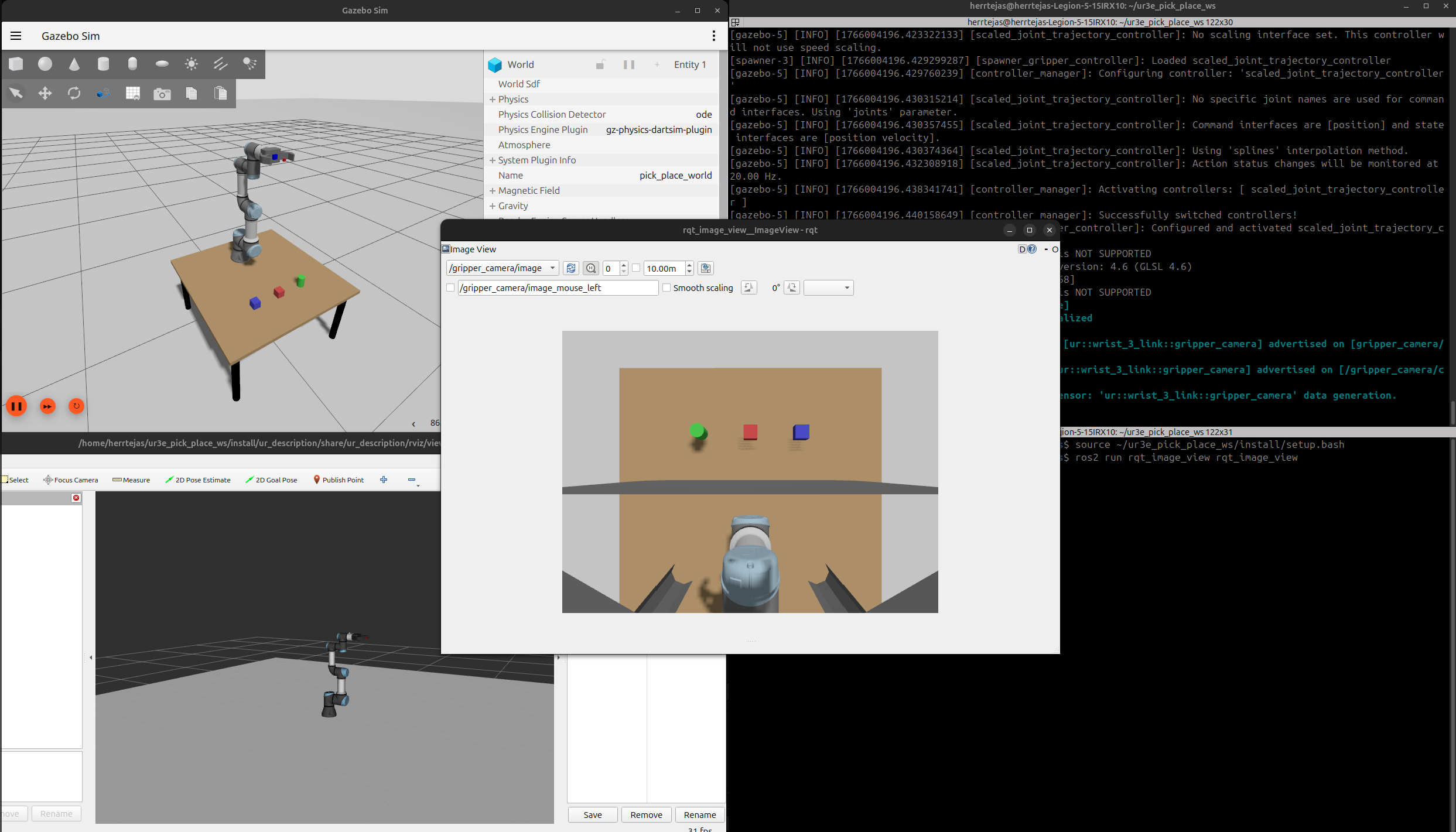
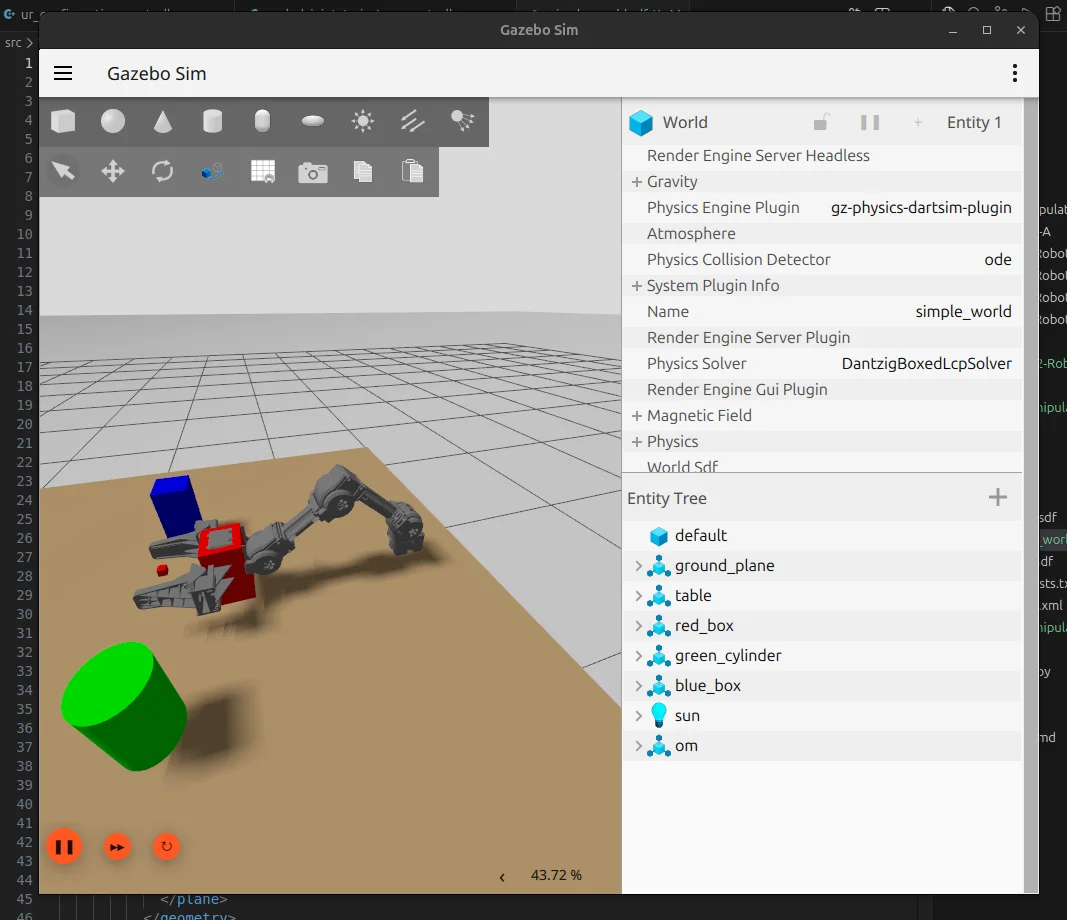
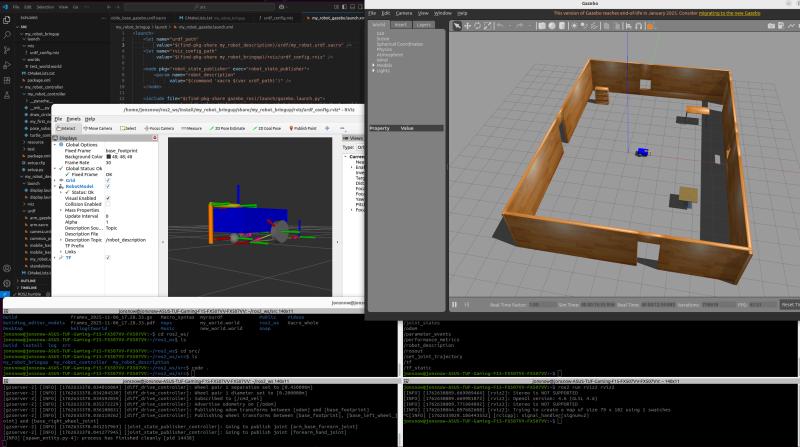
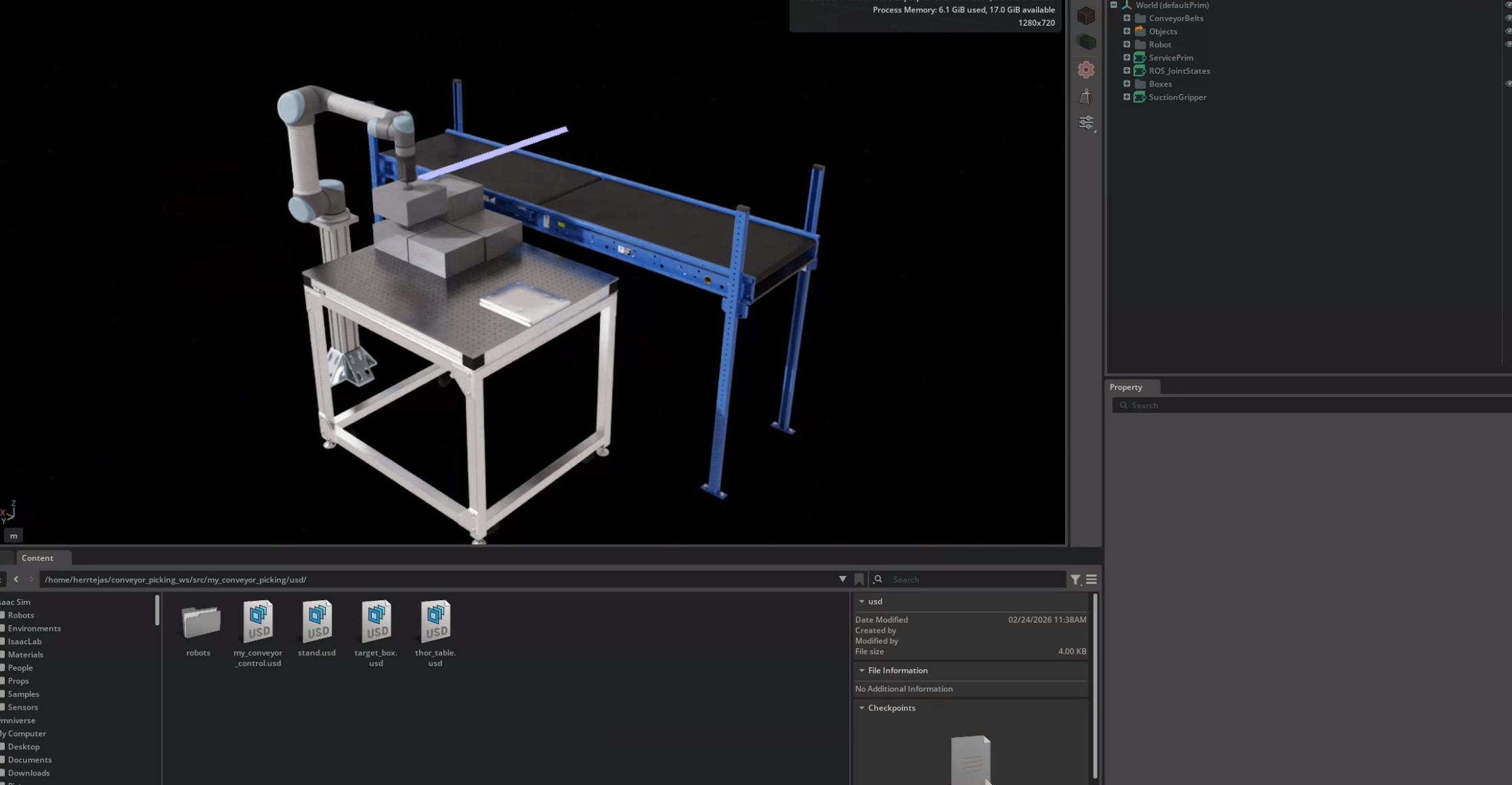
Currently at Arcane Solutions, I'm developing vision-based robotic arm systems using ROS 2, Gazebo, MoveIt 2, and OpenCV. I believe in learning by doing – every project is an opportunity to push boundaries and create impactful automation solutions.